
[기사 제목]
데이브 더 다이버, 3D에 뛰어든 2D 캐릭터
조회수 13898 | 루리웹 |
입력 2024.05.22 (15:50:00)
[기사 본문]
22일 오후 1시 40분, 'U Day 서울'에 참가한 민트로켓의 변순항 소프트웨어 엔지니어가 'Dave, a 2D-Diver in a 3D-Land - 데이브 더 다이버 포스트모템'이라는 제목의 세션을 진행했기에 이를 들어 보았다.
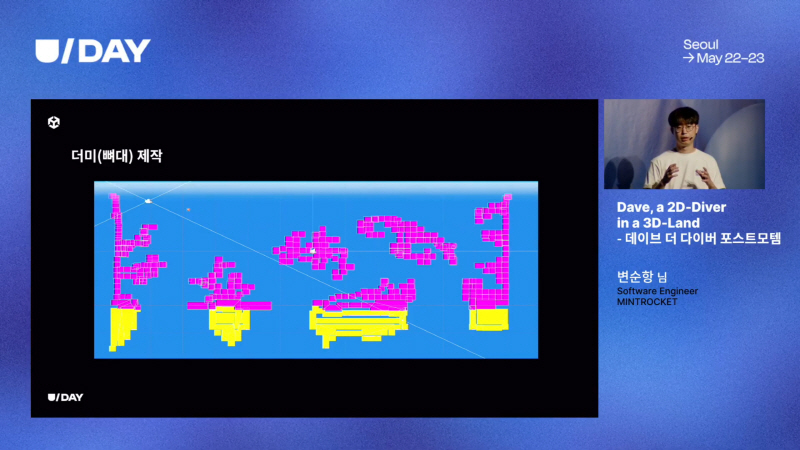
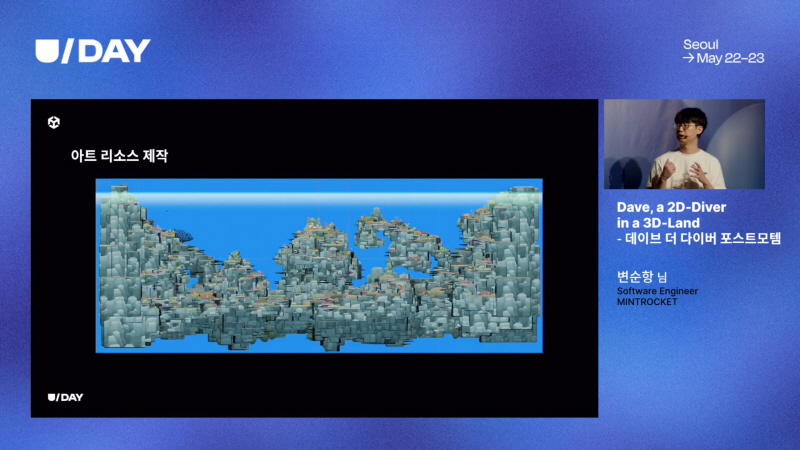
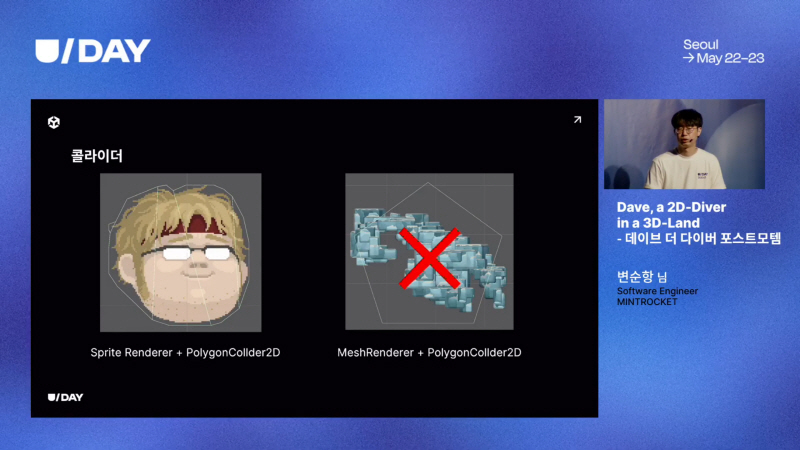
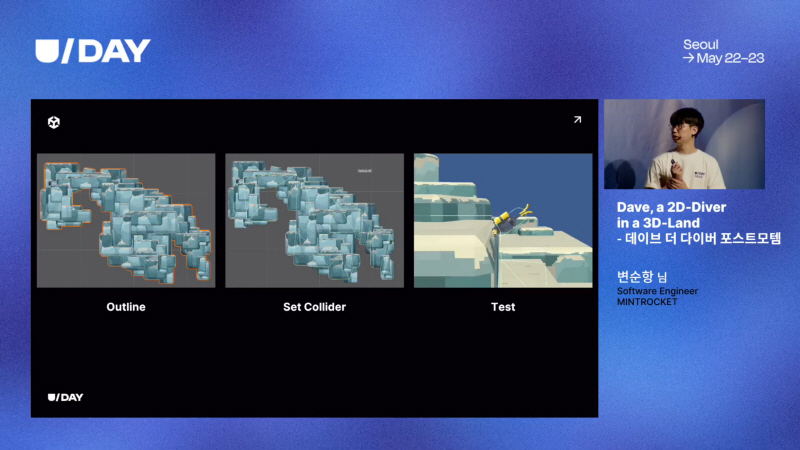
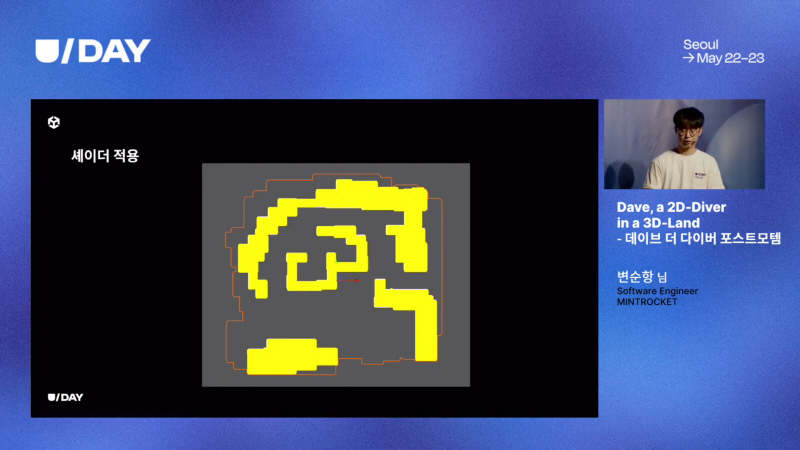
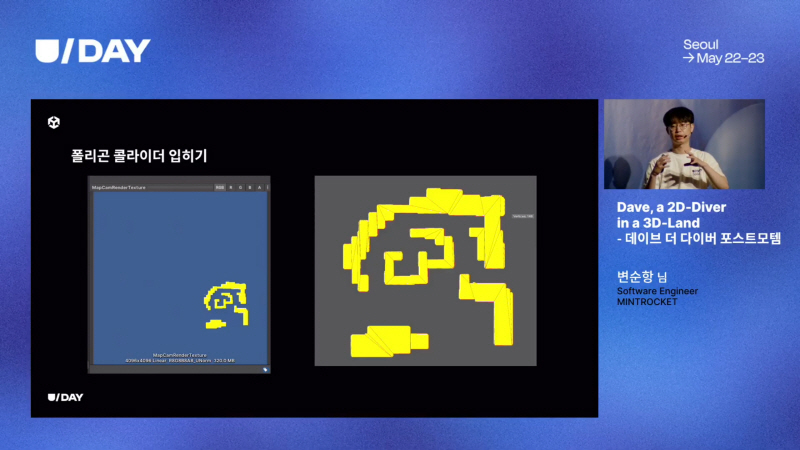
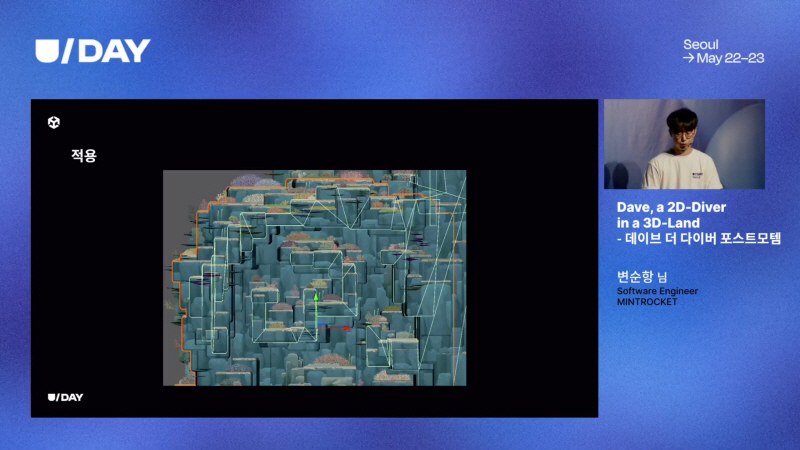
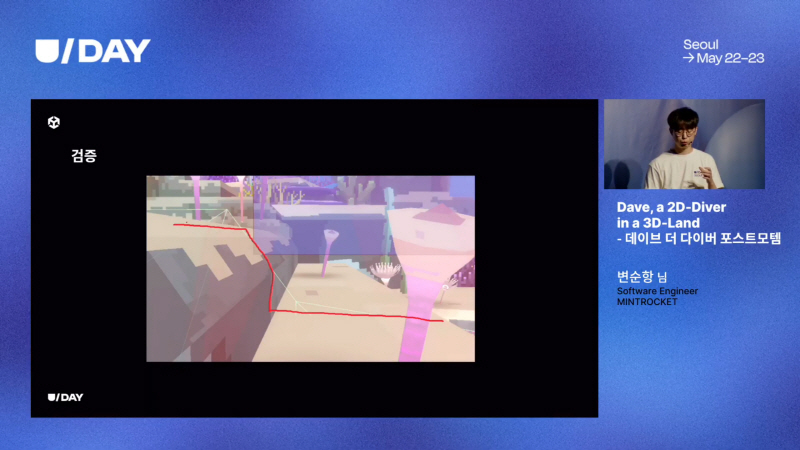
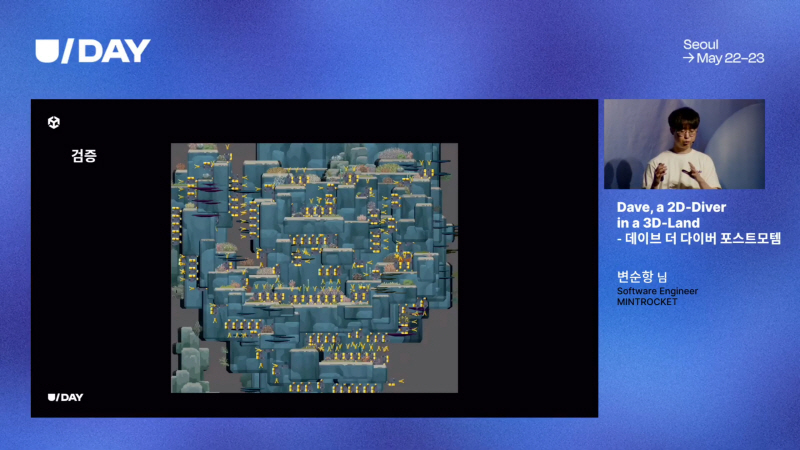
바닷속 지형은 게임의 밸런스를 조절하며, 입체감과 공간감을 주어 2D와 3D를 조화시킨다.
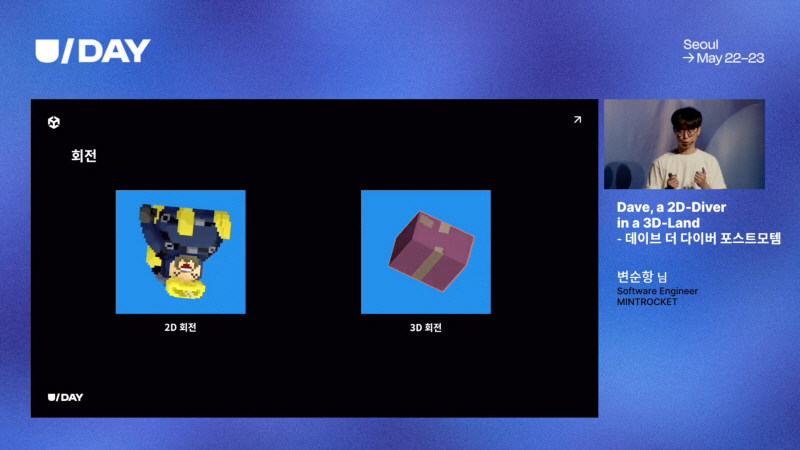
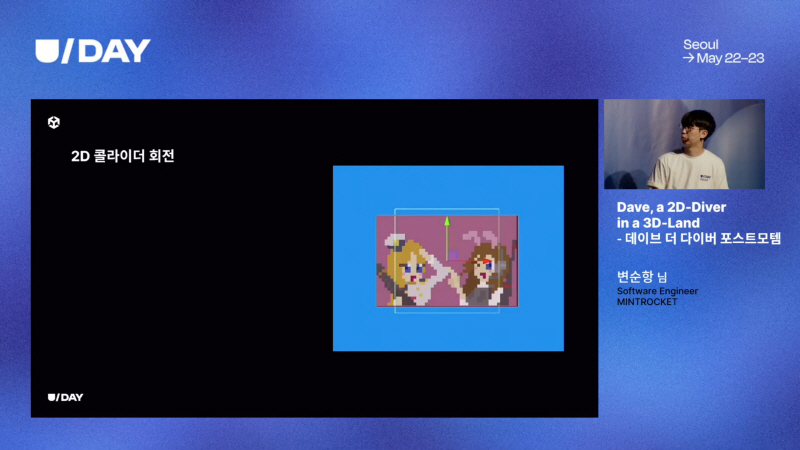
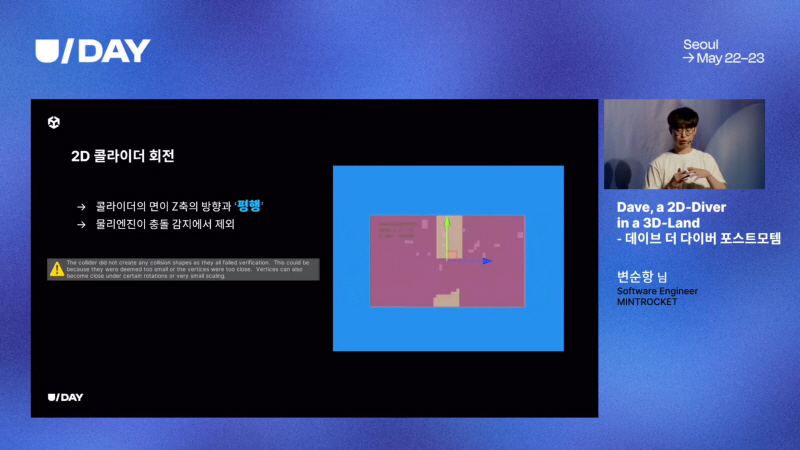
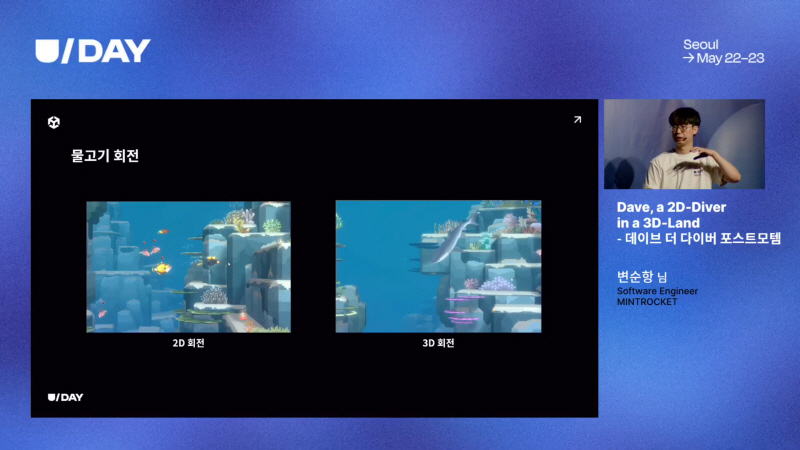
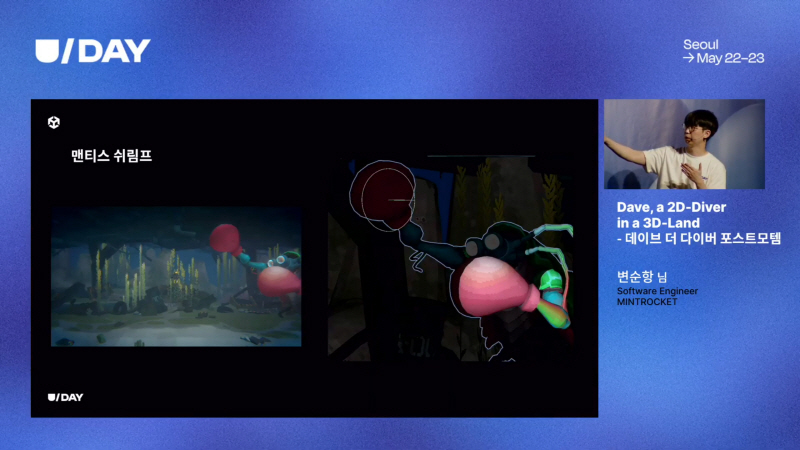
움직이지 않는 배경과 달리 물고기는 회전을 하는데, Z축으로만 회전하는 2D와 달리 3축을 모두 사용하는 3D 회전은 성격이 판이하게 다르다.
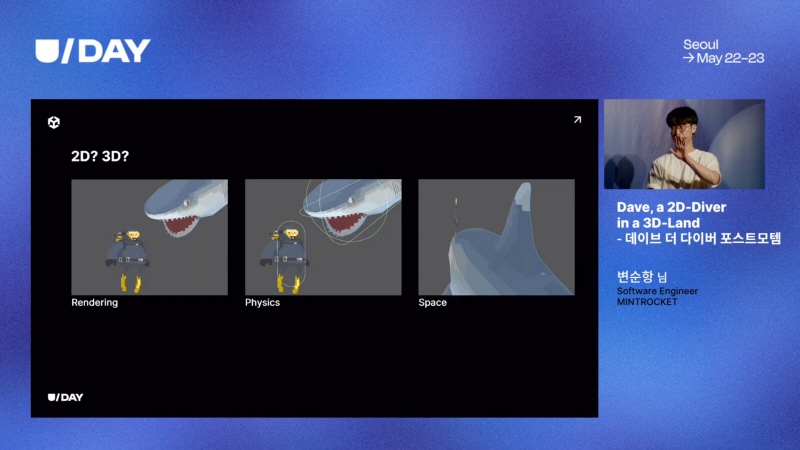
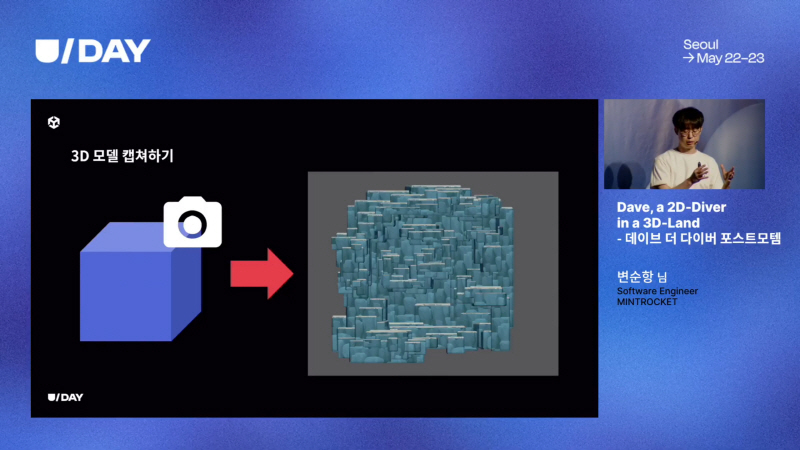
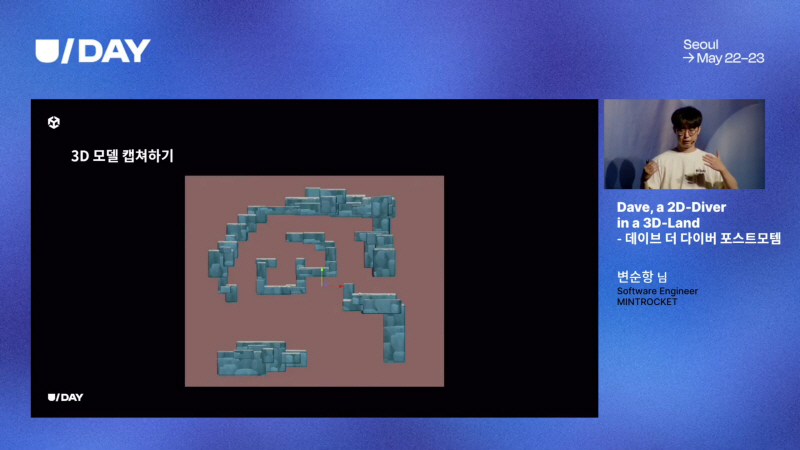
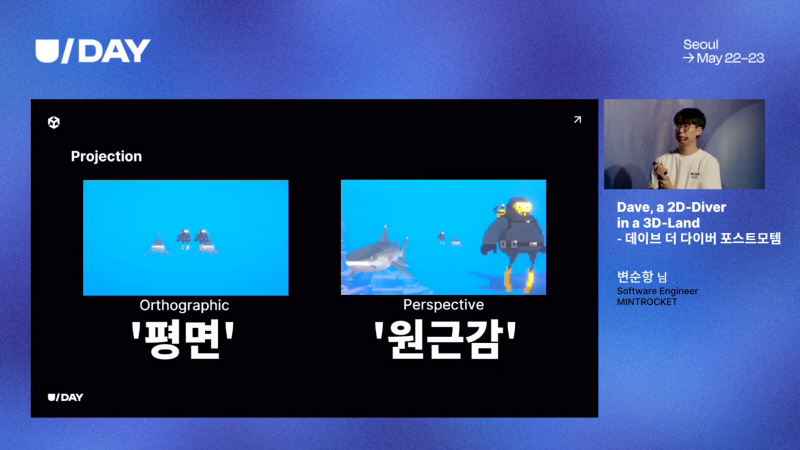
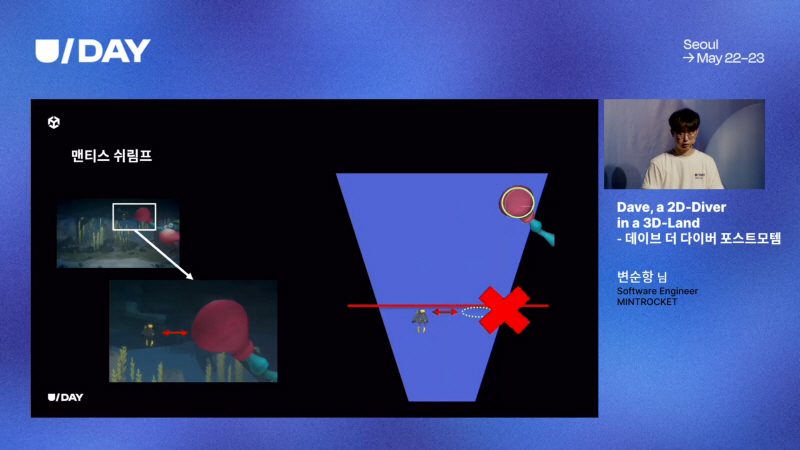
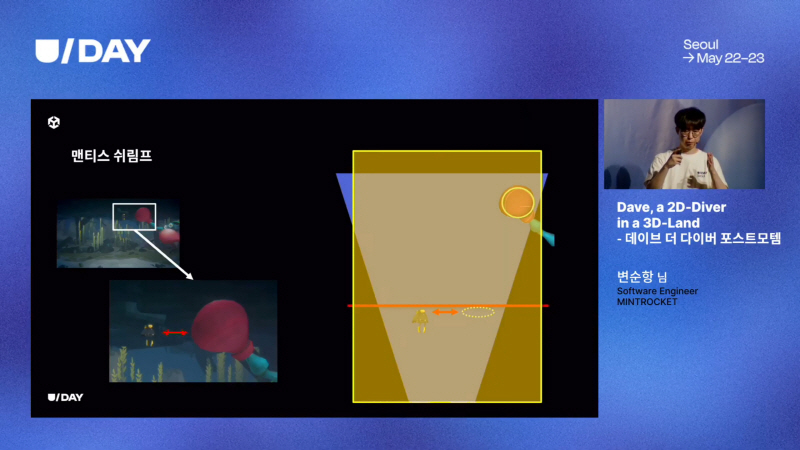
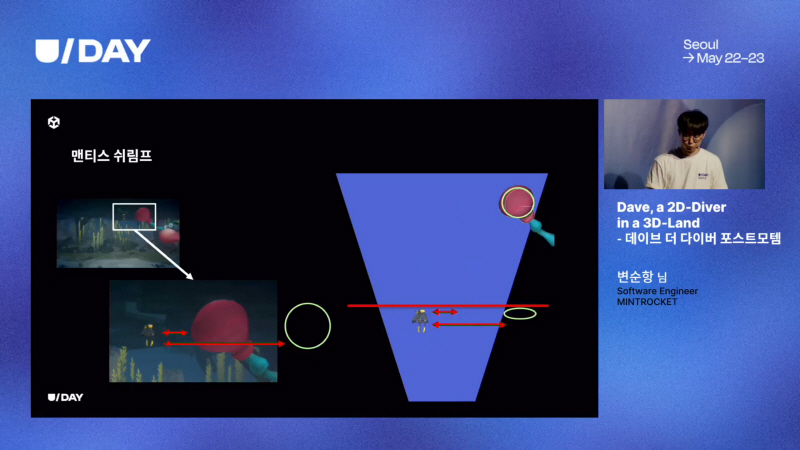
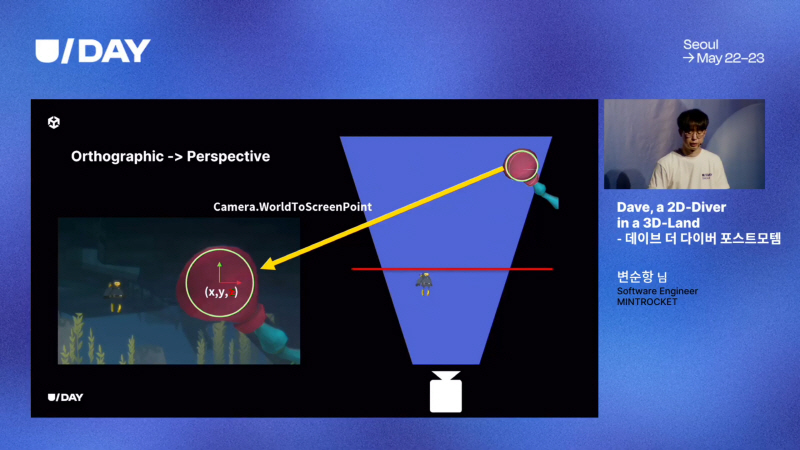
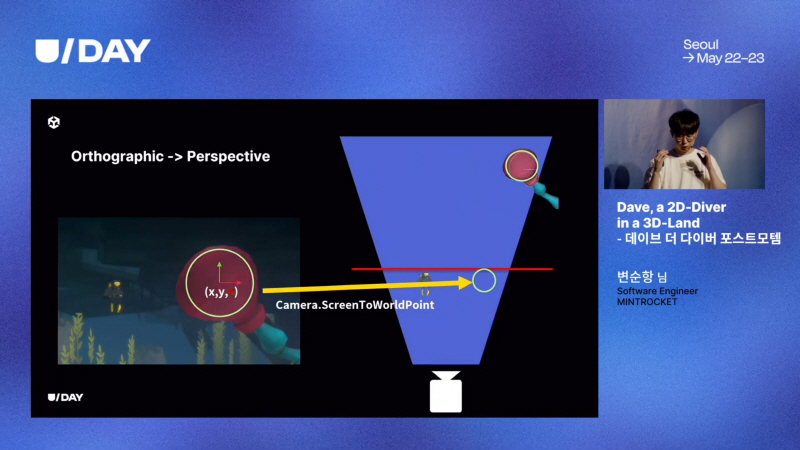
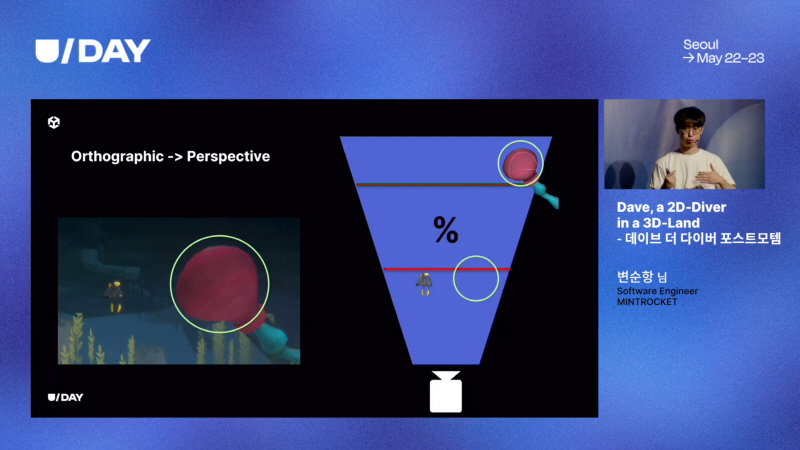
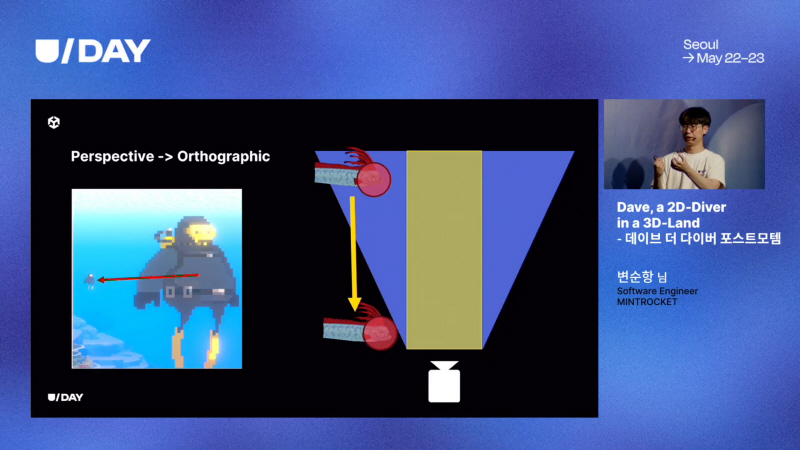
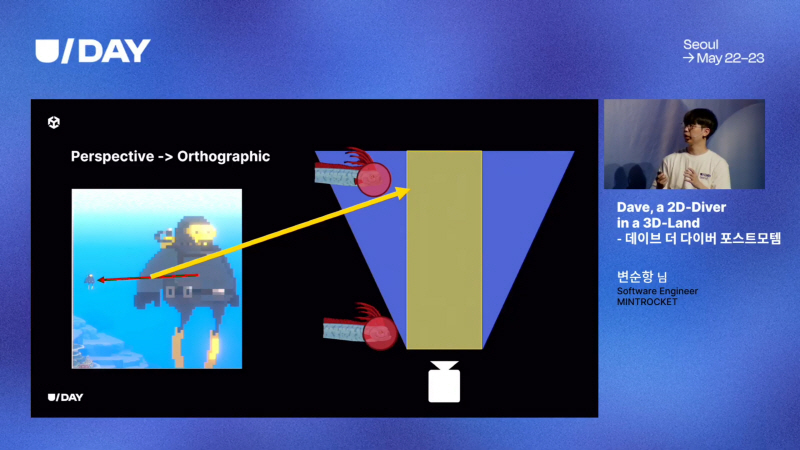
퍼스펙티브와 오쏘그래픽은 카메라 컴포넌트의 프로젝션 타입으로 렌더링하는 이미지의 가시적 특성을 결정한다. 오쏘그래픽에는 깊이가 반영되지 않고, 퍼스펙티브에는 원근감이 적용된다. 그래서 깊이값이 필요 없는 2D 게임은 오쏘그래픽, 원근감이 필요한 3D 게임은 퍼스펙티브 프로젝션 타입으로 개발한다.
바닷속 지형은 게임의 밸런스를 조절하며, 입체감과 공간감을 주어 2D와 3D를 조화시킨다.


움직이지 않는 배경과 달리 물고기는 회전을 하는데, Z축으로만 회전하는 2D와 달리 3축을 모두 사용하는 3D 회전은 성격이 판이하게 다르다.
퍼스펙티브와 오쏘그래픽은 카메라 컴포넌트의 프로젝션 타입으로 렌더링하는 이미지의 가시적 특성을 결정한다. 오쏘그래픽에는 깊이가 반영되지 않고, 퍼스펙티브에는 원근감이 적용된다. 그래서 깊이값이 필요 없는 2D 게임은 오쏘그래픽, 원근감이 필요한 3D 게임은 퍼스펙티브 프로젝션 타입으로 개발한다.
| 이장원 기자 inca@ruliweb.com |